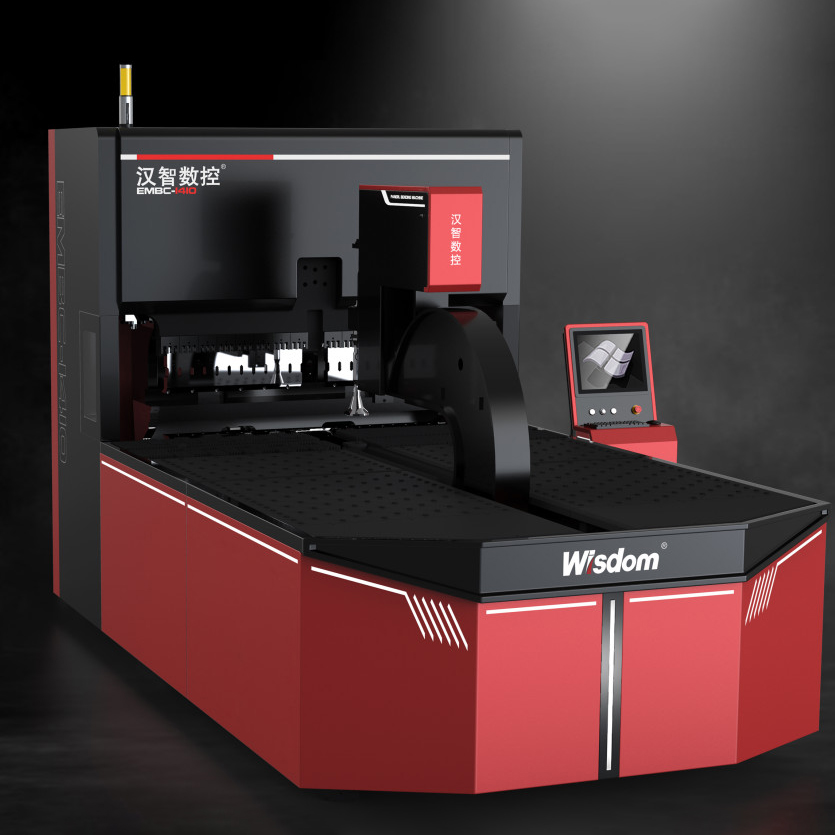
පහළ-ක්රියාකාරී හයිඩ්රොලික් CNC ප්රෙස් බ්රේක්
විශේෂාංග
Down-acting Ascent භාවිතා කිරීමෙන් විශාල වැඩ කොටස් සරලව යන්ත්රගත කිරීම සක්රීය කරයි. Dr/ve උපාංගය උපකරණයේ ප්රධාන කොටසේ පහළ කොටසේ සඟවා ඇති අතර එමඟින් රාමු අතර ඉඩ ඉතිරි වන අතර විශාල වැඩ කොටස් පවා සැකසීමට හැකිය.
• වැඩ ෙකොටස් මධ්යයේ ප්රමාණවත් බලයක් වැළැක්වීම සඳහා මධ්යම පීඩනය භාවිතා කිරීම
ඉහළ නිරවද්ය නිෂ්පාදන ක්රියාවලිය/ng හමුවීමට.
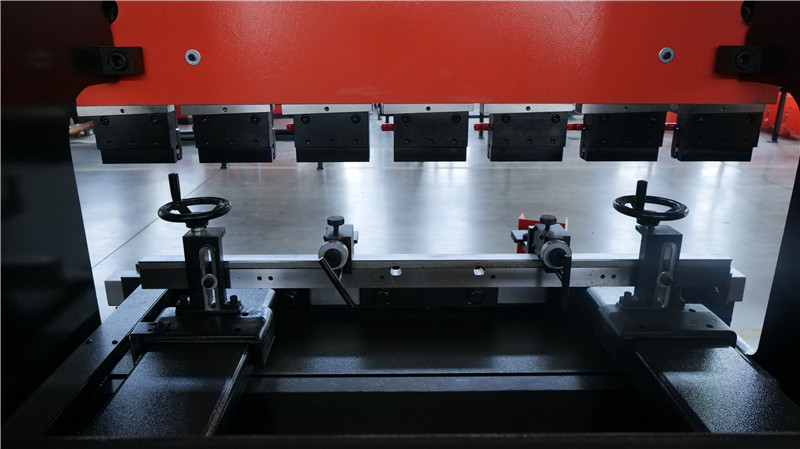
• සැකසීමේදී, වැඩ මේසය ස්ථායී වන අතර චලනය නොවේ.The Roller Guide
යාන්ත්රණය පහළ කොටසේ ඉදිරිපස, පසුපස, වම් සහ දකුණු දිශාවන්හි සකසා ඇත
වැඩ මේසය සුමටව චලනය කළ හැකි සහ පහසුවෙන් සකස් කළ හැකි වැඩ මේසය
වැඩ මේසයේ මාර්ගෝපදේශ ඇඳීම අවම කිරීම සඳහා රෝලර් සහ මාර්ගෝපදේශ අතර පරතරය අවහිර කරයි.
• විශිෂ්ට රාමු ව්යුහ නිර්මාණය දිගු කාලීන භාවිතයෙන් පසුව පවා ඉහළ නිරවද්යතා අවශ්යතා තබා ගනී.ඉහළ වැඩ මේසයට ආනත බ්ලොක් සවි කිරීමේ ක්රමය අනුගමනය කරයි
වෙල්ඩින් රාමුවේ විකෘති කිරීම් සහ D/කැළඹීම් වළක්වා දිගු කාලීන භාවිතයේ නිරවද්යතාවය සහතික කරන්න.සැකසීමේදී රාමුවේ ක්ෂුද්ර ප්රත්යාස්ථ විරූපණය කළ හැක
වැඩ බංකුව ඉදිරිපිට හොඳින් සුසර කරන්න.
• පහල වගුවේ පහල සීමාව Pos/tion සකසනු ලබන්නේ Encoder Pos/tion කියවීමෙනි.
මෙම Des/gn හි, විවිධ වංගුව අනුව විවිධ පහළ සීමාව ස්ථාන/ස්ථාන සැකසිය හැක-
Ing Lengths, එමගින් නැමීමේ කාර්යක්ෂමතාව වැඩි දියුණු කිරීම.
• පියවරෙන් පියවර චාප නැමීමේ ක්රියාකාරිත්වය සමඟින් නිර්මාණය කර ඇති අතර පසුපස මාපකය සමාන දුරින් ඉදිරියට ගමන් කරයි.එය චලනය වන සෑම අවස්ථාවකම, එක් වංගුවක් සාදනු ලබන අතර, බොහෝ වාර ගණනක් නැමීමෙන් පසුව අපේක්ෂිත රේඩියනය සහ ඇතුළත් කෝණය සෑදෙයි.
• පසුපසට ඇද දැමීම වැළැක්වීමේ කාර්යය, පසුපසට ඇදීමේ ස්ථානය/ෂන් සහ පසුපසට ඇදීමේ ප්රමාදය සැකසීමෙන්, වැඩ කොටස පිටුපස නැවතුම සමඟ ගැටීමෙන් වළක්වා ගත හැකිය.
වැඩ කොටස යන්තගත කිරීමේ ක්රියාවලිය.
• නැමෙන කෑලි මුළු ගණන ගණනය කිරීමේ කාර්යය.
Mquick Splint භාවිතා කිරීමට පහසු වන අතර පේටන්ට් බලපත්රයක් සඳහා ඉල්ලුම් කර ඇත.
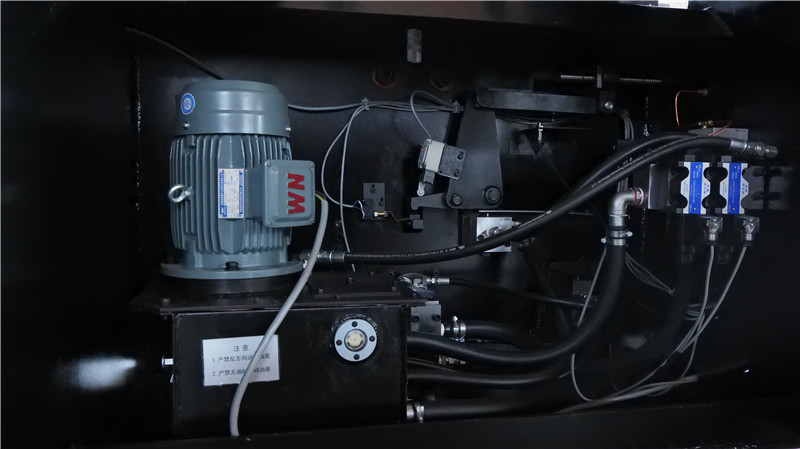
• පහළ නැමීමේ යන්ත්රය නැමෙන විට සහ නැමෙන විට, මෝටරය ගියර් පොම්පය ප්රතිදාන බලයට ධාවනය කරයි, සහ එය බැස යන විට සහ ආපසු එන විට, එය වැඩ මේසයේ / තමාගේ බර අනුව අවබෝධ වේ, සහ මෝටර් අයිඩ්ලිං බලශක්තිය ඉතිරි කරයි.
• Wy-100 විසින් Ma/n ඔයිල් සිලින්ඩරයක සහ සහායක තෙල් සිලින්ඩර දෙකක තෙල් පරිපථ සැලසුම අනුගමනය කරයි, ඒවා පහත වැඩ මේසයේ සමමුහුර්ත ක්රියාව යථාර්ත/ze කළ හැක, ප්රතිදානය ඒකාකාරී වන අතර වැඩ මේසය පහසුවෙන් විකෘති නොවේ.
නිෂ්පාදන පිරිවිතර
| ආකෘතිය සහ සම්බන්ධයි වින්යාසය | ||
| මාදිලිය | WY-100 | WY-35 |
| CNC පද්ධතිය | හොලිසි5 | හොලිසිස් |
| සර්වෝ පද්ධතිය | පැනසොනික්/ෆුජ් | පැනසොනික්/ෆුජ් |
| සර්වෝ මෝටෝ | Pangsonic/Fuj | පැනසොනික්/ෆුජ් |
| බලකාය (KN) | 1000 | 350 |
| නැමීමේ දිග (මි.මී.) | 3000 | 1400 |
| ඉහළ-පහළ ආඝාතය (මි.මී.) | 100 | 100 |
| උගුර ගැඹුර (මි.මී.) | 405 | 300 |
| අංකය.සිලින්ඩරය | 3(1 mg.2 සහායක) | 1 |
| චලන වේගය වැඩි (mm/sec) | 58 | 46 |
| නැමීමේ වේගය (mm/sec) | 10.8 | 8 |
| ළඟා වන වේගය (mm/sec) | 52 | 40 |
| බැෆල්හි ඉහළ සහ පහළ මානයන් (මි.මී.) | 55-140 | 55-140 |
| අවසර ලත් බෆල් බලය (N) | 100 | 100 |
| ගමන් මලු ස්ථානගත කිරීමේ නිරවද්යතාවය (මි.මී.) | ± 0.1 | ± 0.1 |
| X අක්ෂ ආඝාතය (මි.මී.) | 430 | 430 |
| X-අක්ෂය උපරිම.පෝෂණ වේගය (මි.මී./මිනි) | 15 | 15 |
| X-අක්ෂය නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය (මි.මී.) | ± 0.02 | ± 0.02 |
| මෝටර් බලය (KW) | 5.5 | 2.2 |
| බර (කිලෝ | 6700 | 2200 |
| තෙල් ටැංකි ධාරිතාව (L) | 65 | 30 |
විස්තර පෙන්වීම