අර්ධ ස්වයංක්රීය පැනලය බෙන්ඩර් EMBC 1402
නිෂ්පාදන පිරිවිතර
| නැත. | නම | පරාමිතිය | ඒකකය |
| 1 | උපරිම දිග | 1400 | mm |
| 2 | උපරිම පළල | 1400 | mm |
| 3 | අවමනැමීමේ දිග | 200 | mm |
| 4 | අවම.නැමීමේ පළල | 260 | mm |
| 5 | උපරිම නැමීමේ ඝණකම (MS,UTS410N/mm²) | 1 | mm |
| 6 | අවම නැමීමේ ඝණකම (MS,UTS410N/mm²) | 0.5 | mm |
| 7 | උපරිම නැමීමේ උස | 170 | mm |
| 8 | ඉහළ මුද්රණ අත්පොතෙහි දිග ගැලපුම් ආකාරය | ||
| 9 | සාමාන්ය බලශක්ති පරිභෝජනය | 2.2 | KW |
| 10 | බර | 15 | T |
ලක්ෂණ සහ ප්රධාන ව්යුහය
යන්ත්ර සැලසුම් කිරීම සහ නිෂ්පාදනය සම්බන්ධයෙන්, Hebei Hanzhi CNC Machinery Co., Ltd.ප්රධාන වශයෙන් පහත සඳහන් කරුණු කෙරෙහි අවධානය යොමු කරයි:
1. ප්රායෝගිකත්වය හඹා යන සහ සෑම සතයක්ම පරිශීලකයාට ඉතිරි කරන අලෙවිකරණ සංකල්පයකි.
2. ඉතා විශ්වාසදායක සහ නිවැරදි නිර්මාණ සංකල්පයක්.
3. උසස් තත්ත්වයේ අමුද්රව්ය, මිලදී ගත් කොටස් සහ විශිෂ්ට සැකසුම් ශිල්පීය ක්රම.
4. භාවිතයේ පහසුව සහ නඩත්තුව සහ ආරක්ෂාව කෙරෙහි වැඩි අවධානයක් යොමු කිරීම.
5. එකම කර්මාන්තයේ අඩු නඩත්තු අනුපාතය සහ නඩත්තු පිරිවැය.
රාමුව
A. ත්රිමාණ පරිමිත මූලද්රව්ය ආකෘතියක් ගොඩනැගීම: සංවර්ධිත සහ සැලසුම් කරන ලද ත්රිමාණ ඝන ආකෘතිය මත පදනම්ව, ගණනය කිරීම් සඳහා ගතික පරිමිත මූලද්රව්ය ආකෘතියක් ගොඩනගා ඇත.ආකෘතිය බල හුවමාරු සම්බන්ධතාවයේ ප්රධාන සංරචක සලකා බලයි.සම්බන්ධතාවය හරහා බලවේග බෙයාරිං වෙත මාරු කරනු ලබන අතර පසුව දරණ ශක්තිය විශ්ලේෂණය සිදු කරනු ලැබේ.
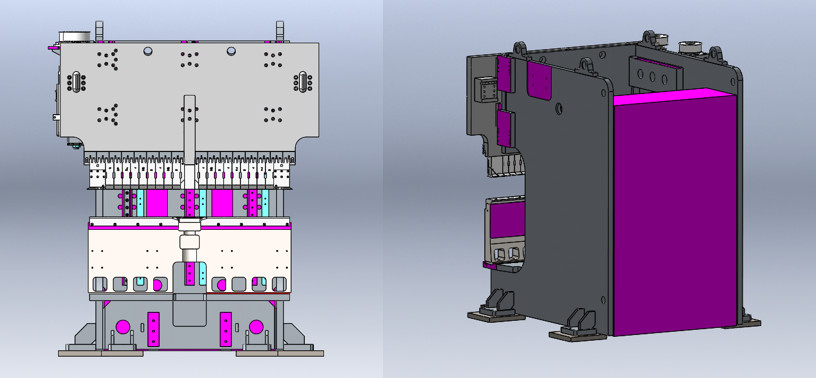
Fig. 1 Panel bender සම්පූර්ණ යන්ත්රයේ පරිමිත මූලද්රව්ය ගතික ආකෘති නිර්මාණය
B. ස්ථිතික විශ්ලේෂණ ප්රතිඵල විශ්ලේෂණය: මන්දගාමී යන්ත්රෝපකරණ වේගය හේතුවෙන් ශක්තිය විශ්ලේෂණය ස්ථිතික ගැටලුවක් දක්වා අඩු කළ හැක.තහඩු සම්පීඩන භාරය සහ කපන හිසෙහි සිරස් දිශාවට නැමීමේ භාරය මත පදනම්ව, ආතතිය සහ විරූපණ ප්රතිඵල පහත දැක්වේ.උපරිම ආතතිය 21.2mpa උපරිම ආතතියකින් ශරීරයේ උගුරේ දිස්වන අතර උපරිම විරූපණය 0.30mm උපරිම විකෘතියක් සහිතව ශරීරයේ ඉහළ කෙළවරේ දිස්වේ.
රාමුවේ සීමිත මූලද්රව්ය විශ්ලේෂණ ප්රතිඵල අනුව, Q345 වානේ ද්රව්යය ලෙස තෝරා ගන්නා ලදී;කාබන් ඩයොක්සයිඩ් පලිහ වෙල්ඩින් සම්මත කරන ලදී;වෙල්ඩින් මගින් ජනනය වන ආතතීන් ඉවත් කිරීම සඳහා තෙම්පරාදු කිරීමේ ප්රතිකාරය සිදු කරන ලදී;එමගින් දිගුකාලීන මෙහෙයුම් සඳහා උපකරණවල නිරවද්යතාව, ස්ථාවරත්වය සහ ඉහළ දෘඪතාව සහතික කරයි.
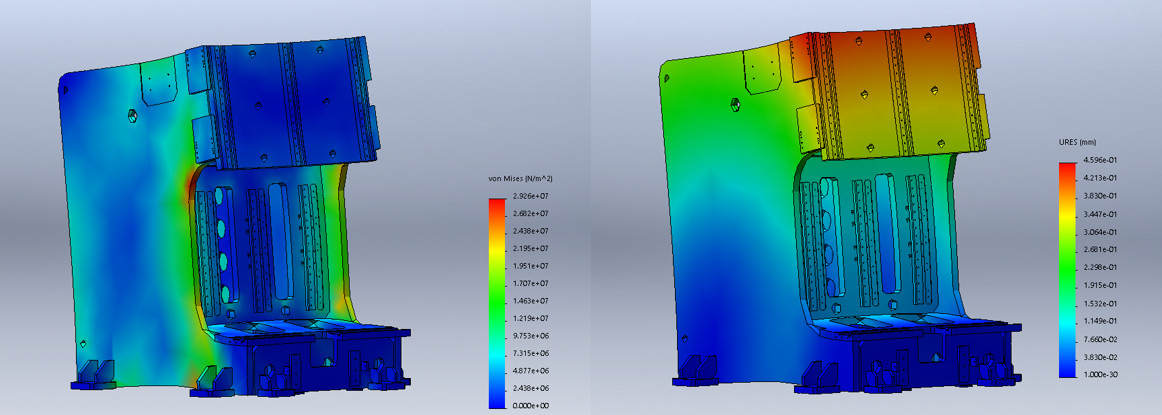
රූප සටහන 2 රාමුවේ ආතති විස්ථාපන විකෘති විශ්ලේෂණ ප්රතිඵල
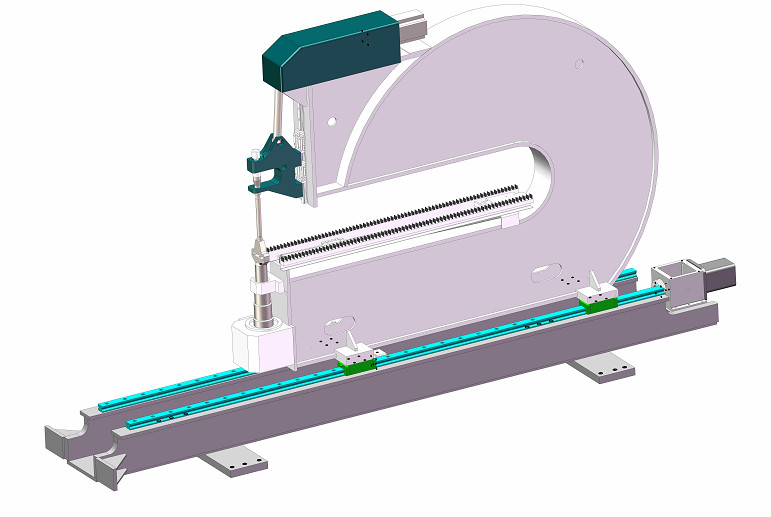
ඉහළ බැටළුව
මෙම කොටස ප්රධාන වශයෙන් ස්ලයිඩරය, ඉහළ ව්යවර්ථ ඊයම් ඉස්කුරුප්පු ඇණ, අඩු කරන්නා, මාර්ගෝපදේශ දුම්රිය, සර්වෝ මෝටරය සහ යනාදිය සමන්විත වේ.ප්රධාන ධාවකය සර්වෝ මෝටරයෙන් පාලනය වන අතර පාලන මාදිලිය සර්වෝ සමමුහුර්ත පාලනය වන අතර එමඟින් ස්ථානගත කිරීමේ නිරවද්යතාවය, වේගවත් වේගය සහ ඉහළ පාලන හැකියාව සහතික කළ හැකිය.ඊයම් ඉස්කුරුප්පු ඇණ සහ මාර්ගෝපදේශක රේල් ලිහිසි කිරීම ස්වයංක්රීය ලිහිසි කිරීම භාවිතා කරයි, සහ ග්රීස් 00# වන අතර එමඟින් දිගුකාලීන ක්රියාකාරිත්වය සඳහා ඊයම් ඉස්කුරුප්පු සහ මාර්ගෝපදේශක රේල් වල සේවා කාලය සහ නිරවද්යතාවය සහතික කෙරේ.
ඉහළ ස්ලයිඩරයේ ස්ථිතික විශ්ලේෂණ ප්රතිඵල: ඉහළ වගුවේ ආතති විස්ථාපන වකුගඩු රූප සටහනෙන් පෙන්නුම් කරන්නේ උපරිම ආතතිය ඉහළ කොටසේ දිස්වන බවයි, උපරිම ආතතිය 152mpa, උපරිම විරූපණය ඉහළ වගුවේ ඉහළ කෙළවරේ, උපරිම විරූපණය 0.15mm වේ
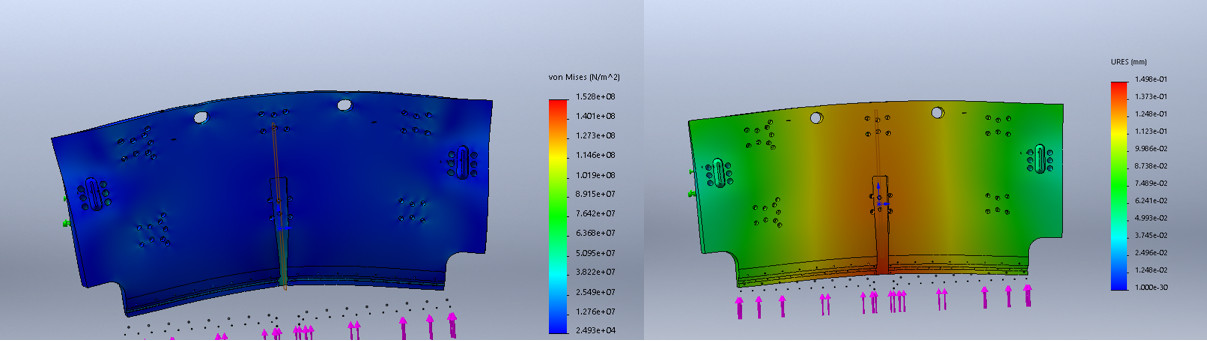
Fig. 3 ආතති විස්ථාපන විශ්ලේෂණ ප්රතිඵල ram
බැටළුවෙහි සීමිත මූලද්රව්ය විශ්ලේෂණ ප්රතිඵල අනුව Q345 වානේ ද්රව්ය ලෙස තෝරා ගන්නා ලදී;CO2 ආවරණ වෑල්ඩින් භාවිතා කරන ලදී;වෙල්ඩින් නිසා ඇතිවන ආතතිය ඉවත් කිරීම සඳහා තෙම්පරාදු ප්රතිකාරය සිදු කරන ලදී;එමගින් දිගුකාලීන මෙහෙයුම් සඳහා උපකරණවල නිරවද්යතාව, ස්ථාවරත්වය සහ ඉහළ දෘඪතාව සහතික කරයි.
නැමීමේ ඒකකය
නැමීමේ ඒකකයේ බල ධාවක කොටස හයිඩ්රොලික් පද්ධතියක සම්බන්ධයකින් තොරව සර්වෝ මෝටරයක් මගින් මෙහෙයවනු ලබන අතර, බලශක්ති ඉතිරිකිරීමේ සහ පාරිසරික ආරක්ෂණ ප්රතිපත්තියට අනුකූලව, සංරචකවල ඇඳීම් සහ ඉරීම සහ සම්ප්රේෂණ කාර්යක්ෂමතාව අඩු කිරීම සම්බන්ධයෙන් විශාල වාසි ඇත. රාජ්යය විසින්.
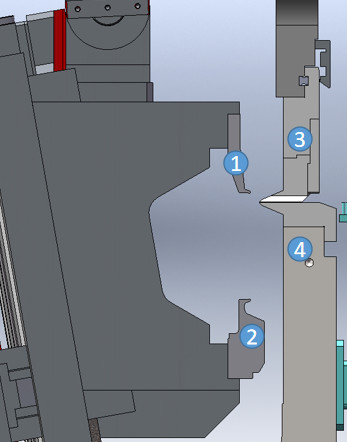
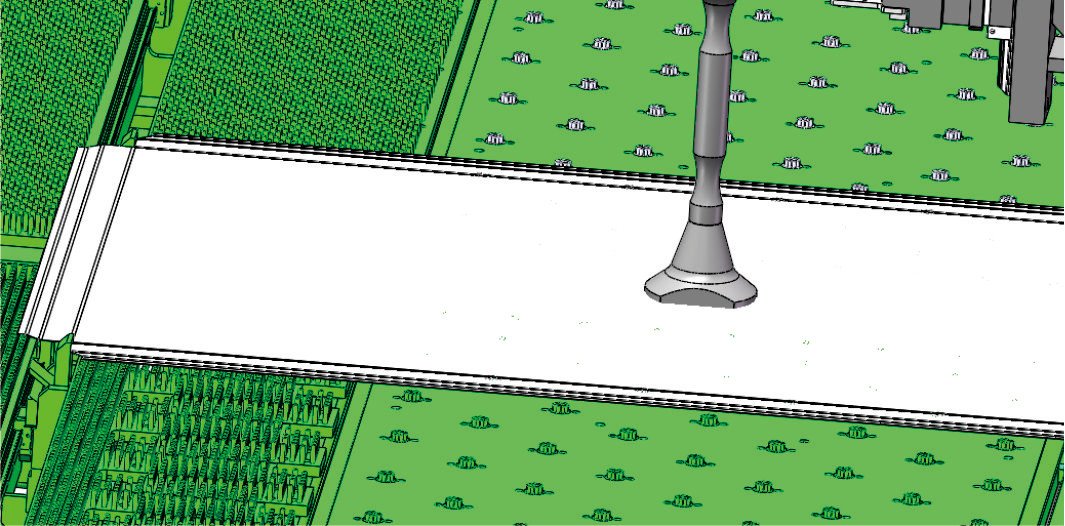
පත්ර තොරතුරු සැකසීමට අනුව, පද්ධතිය ස්වයංක්රීයව ඉහළ මුද්රණ පිහිය 3 හි පිහිටීම ගණනය කරන අතර පත්රය සවි කිරීම සඳහා ඉහළ මුද්රණ පිහිය 3 සහ පහළ මාධ්ය පිහිය 4 අතර දුර පාලනය කරයි;පද්ධති සැකසුම අනුව, මෙම නැමීම ඉහළ හෝ පහළ වුවද, පහළ මාධ්ය පිහිය 2 හෝ ඉහළ මාධ්ය පිහිය 1 නැමීමේ ස්ථානයට ඉක්මනින් ගමන් කිරීමට පාලනය වේ;විවිධ සැකසුම් කෝණවලට අනුව, නැමීම සම්පූර්ණ කිරීම සඳහා පේටන්ට් බලපත්රලත් කෝණ ගණනය කිරීමේ සූත්රය හරහා ගණනය කළ ස්ථානයට නැමීමේ පිහිය පාලනය වේ.
නැමීමේ විවිධ ක්රම අනුව, කෝණ නැමීම, විශාල චාප නැමීම, පැතලි නැමීම යනාදිය ලෙස බෙදිය හැකි අතර, එම කෝණ නැමීම ඉහළට නැමීම සහ පහළට නැමීම ලෙස බෙදා ඇත.
ඉහළ මාධ්ය ඒකකය
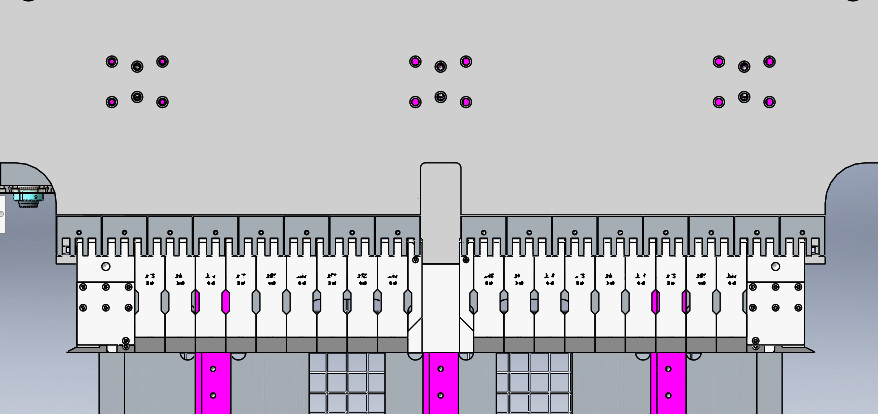
Fig.6 ඉහළ මාධ්ය ඒකකය
ඉහළ මුද්රණ ඒකකය: සියලුම නැමීමේ ක්රියාවලීන්ගේ කොටසක් වන EmbC සම්පූර්ණ සර්වෝ බහුපාර්ශ්වික නැමීමේ මධ්යස්ථානය විශේෂ ඉහළ මුද්රණ ඒකකයකින් සමන්විත වන අතර එය විවිධ තහඩු දිග සඳහා ස්ථාපනය කර අතින් සකස් කළ හැකිය.
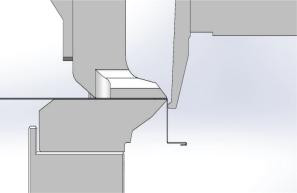
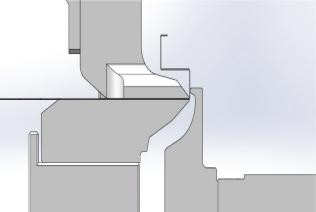
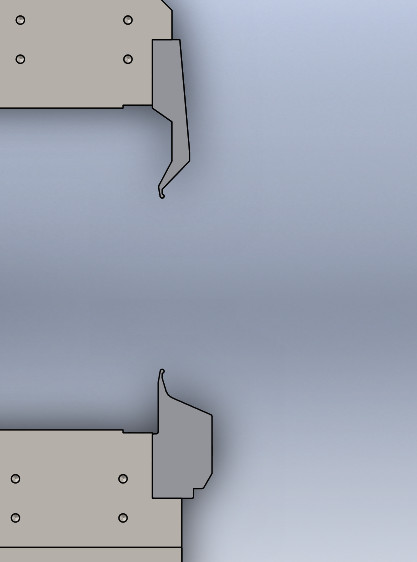
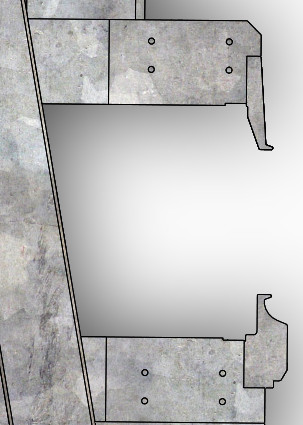
වැළකීමේ නැමීමේ පෙට්ටියේ අවශ්යතා සපුරාලීම සඳහා, අපි විශේෂ වළක්වා ගැනීමේ ඩයි එකක් සකස් කර ඇත්තෙමු.එබීමට පෙර, ප්රස්ථාරයේ එබීමට පෙර වළක්වා ගැනීමේ ඩයි හි කොටසක් පවතින අතර පෝෂණය ආරම්භ වේ.පෝෂණය කිරීමෙන් පසු, එය රූප සටහනේ එබීමෙන් පසු තත්වයේ පවතින අතර නැමීම ආරම්භ වේ.නැමීමෙන් පසු, ඉහළ ස්ලයිඩරය චලනය වේ.ඉහළ ස්ලයිඩරයේ චලනය අතරතුර, A කොටස එබීමට පෙර ස්වයංක්රීයව ප්රාන්තයට ගමන් කරයි.ඉහළ ස්ලයිඩරය සැකසූ ස්ථානයට මාරු වූ පසු, ඊළඟ චලනය ආරම්භ වේ.
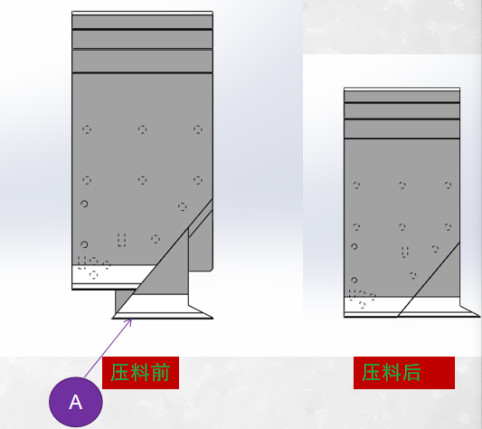
Fig.7 නැමීමේ පෙට්ටිය වැළැක්වීම
මෙවලම
නැමීමේ මෙවලම් ඉහළ නැමීමේ මෙවලම් සහ පහළ නැමීමේ මෙවලම් ලෙස බෙදා ඇත.පාරිභෝගිකයාගේ විවිධ අවශ්යතා අනුව විශේෂ නැමීමේ මෙවලම් අභිරුචිකරණය කළ හැකිය.
2.තහඩු පෝෂණ ඒකකය:
තහඩු ලෝහයේ චලනය, කලම්ප සහ භ්රමණය පාලනය කරනු ලබන්නේ රොබෝ 1, සවිකෘත 2 සහ භ්රමණය වන තැටිය 3 විසිනි.සමස්ත යන්ත්රෝපකරණ ක්රියාවලියේදී, තහඩු ලෝහ පෝෂණය සර්වෝ මෝටර මගින් පාලනය වේ, ස්වයංක්රීයකරණය සහ වේගවත් ස්ථානගත කිරීම, චලනය වීමේ කාලය අඩු කිරීම සහ කාර්යක්ෂමතාව වැඩි කිරීම.ව්යුහාත්මක නවෝත්පාදනයන් සහ සම්පූර්ණ සර්වෝ පාලනය යෙදීමට ස්තූතිවන්ත වන අතර, තහඩු ලෝහයේ කලම්ප සහ භ්රමණය බහුපාර්ශ්වික නැමීමේ මධ්යස්ථානයේ ක්රියාකාරී ක්රියාවලිය පුරාම නිරවද්යතාවය පවත්වා ගැනීමට හැකි වේ.බොහෝ සංකීර්ණ වැඩ කොටස් සඳහා, බහුඅස්ර පවා, 0.001 ක අඛණ්ඩ භ්රමණ නිරවද්යතාවයක් සහතික කළ හැකිය.
3.තහඩු ස්ථානගත කිරීමේ ඒකකය:
තහඩු ස්ථානගත කිරීමේ ඒකකය වම් ස්ථානගත කිරීමේ පින් එකකින්, දකුණු ස්ථානගත කිරීමේ පින් එකකින්, ඉදිරිපස ස්ථානගත කිරීමේ පින් එකකින් සහ පසුපස ස්ථානගත කිරීමේ පින් එකකින් සමන්විත වේ;වම් සහ දකුණු ස්ථානගත කිරීමේ කටු තහඩුව වමට සහ දකුණට ස්ථානගත කරයි.ඉදිරිපස ස්ථානගත කිරීමේ පින් සහ පසුපස ස්ථානගත කිරීමේ පින් එක තහඩුවේ ඉදිරිපස සහ පසුපස පිහිටීම පාලනය කරන අතර තහඩුවේ ස්ථානගත කිරීමේ නිරවද්යතාවය සහතික කිරීම සඳහා භාවිතා කරන ඉහළ සහ පහළ මුද්රණ පිහිවලට තහඩුව සමාන්තර වන බව සහතික කරයි.
තහඩු ස්ථානගත කිරීමේ ඒකකයට තහඩුව ස්වයංක්රීයව ස්ථානගත කර එකවර බහුපාර්ශ්වික නැමීම ස්වයංක්රීයව සම්පූර්ණ කළ හැකි අතර එමඟින් නැමීමේ චක්ර කාලය බෙහෙවින් කෙටි කරයි, පළමු නැමීමේ දී තහඩුවේ කැපීමේ දෝෂය පාලනය කරයි සහ නැමීමේ නිරවද්යතාවය සහතික කරයි.
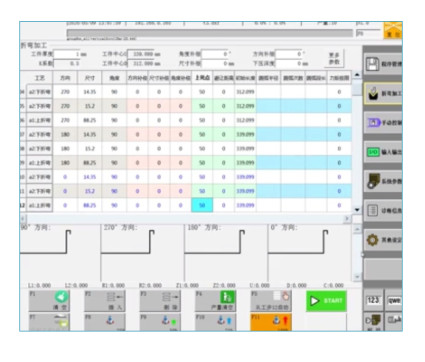
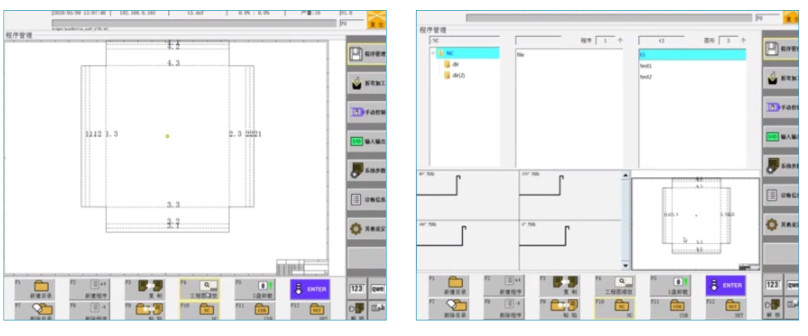
4.CNC පද්ධතිය
A: ඒකාබද්ධව සංවර්ධනය කරන ලද CNC පද්ධති සහ මෘදුකාංග ඉක්මනින් සහ පහසුවෙන් යෙදිය හැකි අතර කළමනාකරණය කළ හැක
B: ප්රධාන ලක්ෂණ.
ඒ) .ඉහළ මැදිහත්වීම් ප්රතිරෝධයක් සහිත EtherCAT බස් පාලන ක්රමය
b) සෘජු වැඩසටහන්කරණයට සහය දක්වයි, එක් එක් පියවර සඳහා නැමීමේ දත්ත පෝරමයට ඇතුළත් කළ හැකිය
ඇ) වක්ර නැමීම සඳහා ආධාරකයක්
ඈ) සම්පූර්ණයෙන්ම විදුලි සර්වෝ පාලනය
e) නැමීමේ වන්දි සඳහා සහාය
f) ද්විමාන වැඩසටහන් සඳහා සහාය
2D ක්රමලේඛන කාර්යය, 2D DXF ඇඳීම් දත්ත ආයාත කරන්න, ස්වයංක්රීයව නැමීමේ ක්රියාවලිය උත්පාදනය කරන්න, නැමීමේ ප්රමාණය, නැමීමේ කෝණය, භ්රමණ කෝණය සහ වෙනත් දත්ත.තහවුරු කිරීමෙන් පසුව, ස්වයංක්රීය නැමීම් සැකසීම සිදු කළ හැකිය
ප්රධාන කොටස ලැයිස්තුව
| නැත. | නම | වෙළඳ නාමය |
| 1 | රාමුව | ප්රඥාව |
| 2 | මෙවලම | ප්රඥාව |
| 3 | නැමීමේ ඒකකය | ප්රඥාව |
| 4 | CNC පද්ධතිය | ප්රඥාව |
| 5 | සර්වෝ මෝටරය | ප්රඥාව |
| 6 | සර්වෝ රියදුරු | ප්රඥාව |
| 7 | රේල් | ප්රඥාව |
| 8 | බෝල ඉස්කුරුප්පු | ප්රඥාව |
| 9 | අඩු කරන්නා | තායිවානය |
| 10 | බ්රේකර් | ෂ්නයිඩර් |
| 11 | බොත්තම | ෂ්නයිඩර් |
| 12 | විදුලි කොටස | ෂ්නයිඩර් |
| 13 | කේබල් | Yicu |
| 14 | සමීප ස්විචය | ඔම්රොන් |
| 15 | දරණ | SKF/NSK/NAICH |
4) යන්ත්ර මෙවලම සැලසුම් කිරීම, නිෂ්පාදනය කිරීම, පරීක්ෂා කිරීම සහ ස්ථාපනය කිරීම පහත ප්රමිතීන්ට අනුකූල වේ.
1,GB17120-1997
2, Q/321088JWB19-2012
3,GB14349-2011
අමතර කොටස් සහ මෙවලම් ලැයිස්තුව
| නැත. | නම | Qt. | සටහන් කරන්න |
| 1 | මෙවලම් පෙට්ටිය | 1 | |
| 2 | පෑඩ් ස්ථාපනය කරන්න | 8 | |
| 3 | Inner ෂඩාස්රාකාර spanner | 1 කට්ටලයක් | |
| 4 | අතින් ඉන්ධන පිරවුම් තුවක්කුව | 1 | |
| 5 | CNC පද්ධති අත්පොත | 1 | |
| 6 | විවෘත spanner | 1 |





